Showing posts with label Mechanism. Show all posts
Showing posts with label Mechanism. Show all posts




















Swashplate mechanism of the R44
6
comments
Labels:
Mechanism,
R44,
Swashplate
The Robinson R44 uses a semi rigid rotor system. This means that the rotor blades can move independently from the rest of the rotor in some directions. Rigid rotors don't allow any independent movement, forces are absorbed by blade flexing. Fully articulated rotor systems let the rotor blades move in even more independent directions, but this is usually used for helicopters with 3 or more rotor blades.
The next few images will explain how the swashplate mechanism is implemented in the R44, this is the mechanism that allows the helicopter to move in all directions.
 First of all, there's the rotor mast. The mast is responsible for turning the rotor blades and needs to be able to carry the weight of the helicopter. The rotor mast is connected to the transmission, which is in turn connected to a piston engine. Because rotor blades are designed for a specific rotational speed, the mast needs to rotate at that same. In the case of the R44, this speed is 550 RPM. Because the amount of resistance on the blades can vary (different wind conditions, different forward speed, hovering, ...), the throttle needs to be adjusted to maintain a near-constant RPM.
First of all, there's the rotor mast. The mast is responsible for turning the rotor blades and needs to be able to carry the weight of the helicopter. The rotor mast is connected to the transmission, which is in turn connected to a piston engine. Because rotor blades are designed for a specific rotational speed, the mast needs to rotate at that same. In the case of the R44, this speed is 550 RPM. Because the amount of resistance on the blades can vary (different wind conditions, different forward speed, hovering, ...), the throttle needs to be adjusted to maintain a near-constant RPM.
 A ball joint is mounted on the rotor mast. This ball joint can move freely up and down the shaft.
A ball joint is mounted on the rotor mast. This ball joint can move freely up and down the shaft.
 The stationary swashplate is attached to the ball joint. This swashplate can tilt freely around the ball joint. The stationary swashplate consists of a lower and upper part, which are bolted together to clamp over the ball joint. Spacers are added between the lower and upper part to adjust the amount of friction. A specific amount of friction between the ball joint and the lower swashplate is necessary for optimal flight performance.
The stationary swashplate is attached to the ball joint. This swashplate can tilt freely around the ball joint. The stationary swashplate consists of a lower and upper part, which are bolted together to clamp over the ball joint. Spacers are added between the lower and upper part to adjust the amount of friction. A specific amount of friction between the ball joint and the lower swashplate is necessary for optimal flight performance.
 To keep the stationary swashplate from rotating with the rotor, a scissor mechanism is added. The scissor connects the swashplate to the fuselage. The scissor consists of 2 parts which are connected by a hinge. One end is connected to the helicopter using a hinge, while the other is connected using a ball joint. This means that the swashplate can move freely up and down, and can freely tilt in any direction, but can't rotate around the mast.
To keep the stationary swashplate from rotating with the rotor, a scissor mechanism is added. The scissor connects the swashplate to the fuselage. The scissor consists of 2 parts which are connected by a hinge. One end is connected to the helicopter using a hinge, while the other is connected using a ball joint. This means that the swashplate can move freely up and down, and can freely tilt in any direction, but can't rotate around the mast.
 Three control rods are attached to the lower swashplate using ball joints. These rods are essential for being able to steer the helicopter. By independently pushing or pulling the rods, the height and tilt of the lower swashplate will change, which in turn changes the blade pitch, and the direction of the helicopter. The rods are connected to the helicopter controls mechanically, but a hydraulics system is in place to assist the pilot. This means that the helicopter can still be steered in case of a hydraulics failure.
Three control rods are attached to the lower swashplate using ball joints. These rods are essential for being able to steer the helicopter. By independently pushing or pulling the rods, the height and tilt of the lower swashplate will change, which in turn changes the blade pitch, and the direction of the helicopter. The rods are connected to the helicopter controls mechanically, but a hydraulics system is in place to assist the pilot. This means that the helicopter can still be steered in case of a hydraulics failure.
 A second swashplate is added on top of the lower swashplate. This swashplate is connected to the previous one by two angular contact ball bearings. The upper swashplate can rotate independently from the lower swashplate, but is constrained to the position and tilt of the lower swashplate, which is controlled by the control rods (and thus the pilot).
A second swashplate is added on top of the lower swashplate. This swashplate is connected to the previous one by two angular contact ball bearings. The upper swashplate can rotate independently from the lower swashplate, but is constrained to the position and tilt of the lower swashplate, which is controlled by the control rods (and thus the pilot).
 A second scissor mechanism is added. This scissor is nearly identical to the one that connects the lower swashplate to the fuselage. The only difference is that this one connects the upper swashplate to the rotor mast. This means that the upper swashplate will always follow the rotor blades.
A second scissor mechanism is added. This scissor is nearly identical to the one that connects the lower swashplate to the fuselage. The only difference is that this one connects the upper swashplate to the rotor mast. This means that the upper swashplate will always follow the rotor blades.
 A Teetering hinge is placed on top of the mast. The hinge is connected to the mast using a big bolt, because this bolt effectively carries the weight of the entire helicopter. This bolt also functions as the rotation point of the teetering hinge, which is why it's placed in the teetering hinge using two plain bearings made out of PTFE. The function of this teetering hinge is to reduce the mechanical stress on the rotor blades caused by the Coriolis effect. This is done by allowing the two blades to perform a seesaw movement: if one blade goes up, the other moves down, and the other way around.
A Teetering hinge is placed on top of the mast. The hinge is connected to the mast using a big bolt, because this bolt effectively carries the weight of the entire helicopter. This bolt also functions as the rotation point of the teetering hinge, which is why it's placed in the teetering hinge using two plain bearings made out of PTFE. The function of this teetering hinge is to reduce the mechanical stress on the rotor blades caused by the Coriolis effect. This is done by allowing the two blades to perform a seesaw movement: if one blade goes up, the other moves down, and the other way around.
 Next, the rotor blades are attached to the teetering hinge. The blades are connected using a large bolt, which is again supported by two PTFE plain bearings. The blades can move up and down independently, this is necessary to reduce the mechanical stress on the blades from coning. Blade coning is the effect of the two main forces which interact with the blade: the lift force and the centrifugal force. Because the lift force can vary, the resulting force points in a different direction. This causes the blades to move to a different angle, depending on the position and tilt of the swashplates. In rigid helicopters, this is absorbed through blade flexing, in semi-rigid helicopters, a hinge lets the blades move freely. When the helicopter has landed, and the rotor is no longer spinning, there is no centrifugal force and lift force to keep the blades horizontal. The blades then rest on droop stops through small rods which extend into the teetering hinge.
Next, the rotor blades are attached to the teetering hinge. The blades are connected using a large bolt, which is again supported by two PTFE plain bearings. The blades can move up and down independently, this is necessary to reduce the mechanical stress on the blades from coning. Blade coning is the effect of the two main forces which interact with the blade: the lift force and the centrifugal force. Because the lift force can vary, the resulting force points in a different direction. This causes the blades to move to a different angle, depending on the position and tilt of the swashplates. In rigid helicopters, this is absorbed through blade flexing, in semi-rigid helicopters, a hinge lets the blades move freely. When the helicopter has landed, and the rotor is no longer spinning, there is no centrifugal force and lift force to keep the blades horizontal. The blades then rest on droop stops through small rods which extend into the teetering hinge.
 To be able to steer the helicopter, the pitch of the blades needs to be adjustable depending on the position of the blade. This means that blades must be able to rotate along their length. Inside the bulge at the base of the rotor blade is a spindle assembly. This assembly contains 6 angular contact ball bearings, which allow the blade to rotate along the length, but keep them from being pulled out by the centrifugal force. At the base of the spindle, there's a rod which is used to control the blade pitch, this rod is called the pitchhorn. The pitchhorn is connected to the upper swashplate by a rod with ball joints. The rods push and pull the pitchhorn to change their rotation, thus changing the lift of that blade, and thus letting the pilot control the helicopter.
To be able to steer the helicopter, the pitch of the blades needs to be adjustable depending on the position of the blade. This means that blades must be able to rotate along their length. Inside the bulge at the base of the rotor blade is a spindle assembly. This assembly contains 6 angular contact ball bearings, which allow the blade to rotate along the length, but keep them from being pulled out by the centrifugal force. At the base of the spindle, there's a rod which is used to control the blade pitch, this rod is called the pitchhorn. The pitchhorn is connected to the upper swashplate by a rod with ball joints. The rods push and pull the pitchhorn to change their rotation, thus changing the lift of that blade, and thus letting the pilot control the helicopter.
The next few images will explain how the swashplate mechanism is implemented in the R44, this is the mechanism that allows the helicopter to move in all directions.





















How helicopters fly
The first step necessary to achieve flight is generating a force which counters gravity. By moving an airfoil through the air, lift is generated due to the shape and angle of the airfoil. In the case of a helicopter, multiple airfoils are attached to a shaft, and by spinning that shaft, lift is generated.

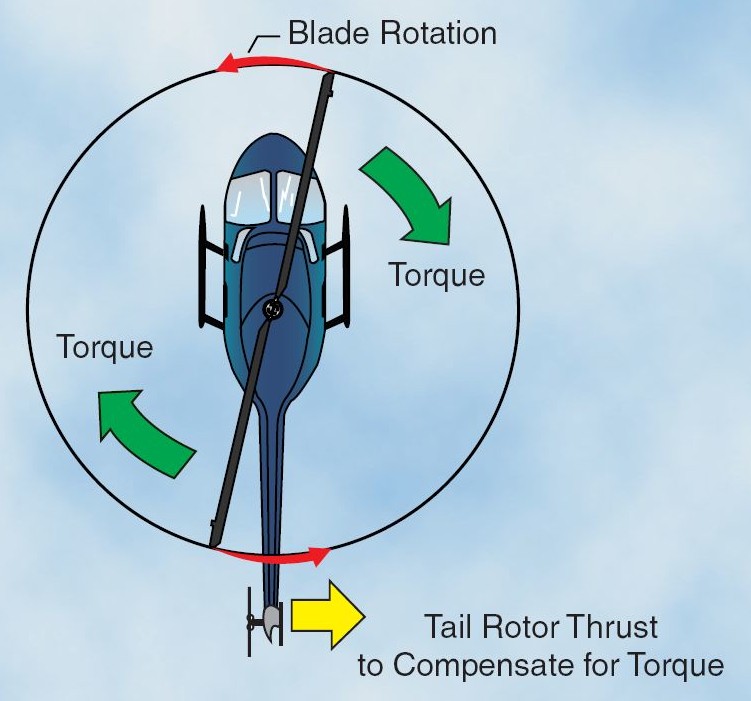
This works well up until the moment the helicopter no longer touches the the ground. Newton's laws of motion dictate that to every action there is an equal and opposite reaction. This means that if the helicopter's rotor turns in one direction, the body of the helicopter will have a tendency to turn in the opposite direction. There are multiple solutions to this problem, but the most common solution is the tail rotor. The tail rotor generates a force which counters the helicopter's tendency to spin.
The next problem is movement, a helicopter with only the previous two mechanisms will only be able to take off and land. One way to make a helicopter move is by constantly changing the angle of attack of the blades. This in turn causes the blades to generate more or less lift on different parts of the surface the rotor blades cover, and this causes the helicopter to move.

This is implemented using a swashplate mechanism. The blades are connected to the rotor shaft using a bearing. A rod is also connected to the blade, and by moving this rod up and down, the blade rotates around its length axis. This means that the rod controls the angle of attack of the blade, and thus controls the lift the blade generates.

All these rods are connected to a ring-shaped plate around the main rotor shaft, and this rotating plate is then connected to a stationary plate using a bearing. Tilting the stationary plate causes the blades to different lift depending on their position, and this causes the helicopter to move. Moving the plate up and down changes the angle of attack of all the blades by the same amount, and thus allows the pilot to control how much lift the helicopter generates.


The combination of these mechanisms allow the helicopter to move in virtually any direction.
Sources:
http://en.wikipedia.org/wiki/Helicopter_rotor
http://en.wikipedia.org/wiki/Swashplate_%28helicopter%29
http://science.howstuffworks.com/transport/flight/modern/helicopter1.htm
This works well up until the moment the helicopter no longer touches the the ground. Newton's laws of motion dictate that to every action there is an equal and opposite reaction. This means that if the helicopter's rotor turns in one direction, the body of the helicopter will have a tendency to turn in the opposite direction. There are multiple solutions to this problem, but the most common solution is the tail rotor. The tail rotor generates a force which counters the helicopter's tendency to spin.
The next problem is movement, a helicopter with only the previous two mechanisms will only be able to take off and land. One way to make a helicopter move is by constantly changing the angle of attack of the blades. This in turn causes the blades to generate more or less lift on different parts of the surface the rotor blades cover, and this causes the helicopter to move.
This is implemented using a swashplate mechanism. The blades are connected to the rotor shaft using a bearing. A rod is also connected to the blade, and by moving this rod up and down, the blade rotates around its length axis. This means that the rod controls the angle of attack of the blade, and thus controls the lift the blade generates.
All these rods are connected to a ring-shaped plate around the main rotor shaft, and this rotating plate is then connected to a stationary plate using a bearing. Tilting the stationary plate causes the blades to different lift depending on their position, and this causes the helicopter to move. Moving the plate up and down changes the angle of attack of all the blades by the same amount, and thus allows the pilot to control how much lift the helicopter generates.
The combination of these mechanisms allow the helicopter to move in virtually any direction.
Sources:
http://en.wikipedia.org/wiki/Helicopter_rotor
http://en.wikipedia.org/wiki/Swashplate_%28helicopter%29
http://science.howstuffworks.com/transport/flight/modern/helicopter1.htm
Subscribe to:
Posts (Atom)